About a month ago, the Ukrainian Ministry of Intelligence released a massive and comprehensive list of foreign electronic components used in Russian military equipment to show everyone just how reliant the Russian military is on Western components. Always having been fascinated by how military equipment is built. I already had a Wiki page (https://wiki.snikolaj.com/en/military/processors-used) on this topic, but the Ukrainian MoI has completely superseded me. Because the website is quite well organized, it is possible to see components, their systems, and the subsystems they belong to. This post should be the first of (hopefully) a series analyzing some Russian military circuits and systems.
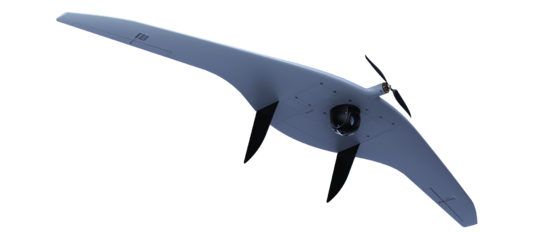
Today on the list is a pretty interesting one: the Supercam S350 video acquisition drone (https://en.supercam.aero/catalog/supercam-s350). Built for ostensibly military purposes, with impressive specifications (up to 100km video transmission), I was really interested in seeing how they transmit video over such long distances with a relatively small drone. For those who want to follow along, here is the link on the Ukrainian MoI’s page: https://war-sanctions.gur.gov.ua/en/components?ComponentsList%5Bcountry_id%5D=&ComponentsList%5Btitle_uk%5D=4112&ComponentsList%5Bsearch%5D=&ComponentsInfo%5Bmanufacturer_en%5D=&ComponentsInfo%5Bmarking%5D=&page=1&per-page=12. The following will be an educated guess based on the components, photos, and their respective locations.
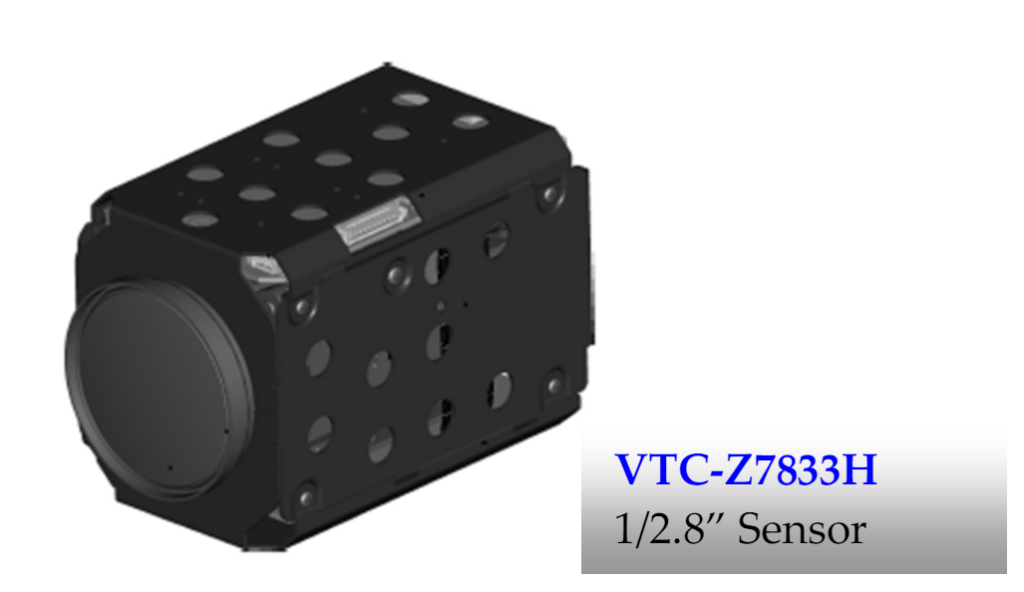
The drone can have multiple camera options, but the captured drone example had a VTC-Z7833H high-performance CCTV camera (https://tvinfo.ru/pdf/vtc-z7833h.pdf) with a 33x optical zoom, likely chosen for the impressive optical zoom and composite video output. A quick search revealed that you can buy this camera for 54000RUB, which is ~600eur at current exchange rates. The camera datasheet emphasizes settings for DVRs and CCTV, meaning that this camera was never intended for military purposes (also indicated by the very narrow temperature range of -10 to 50C, which makes no sense in a Russian climate or warzone).
The camera uses RS232 for its settings – and an RS232 (MAX3232) converter is conveniently present on the main board. The drone uses an SX1276 LoRa transceiver for telemetry and remote commands, specified for applications such as “Irrigation Systems,” which is also not military.
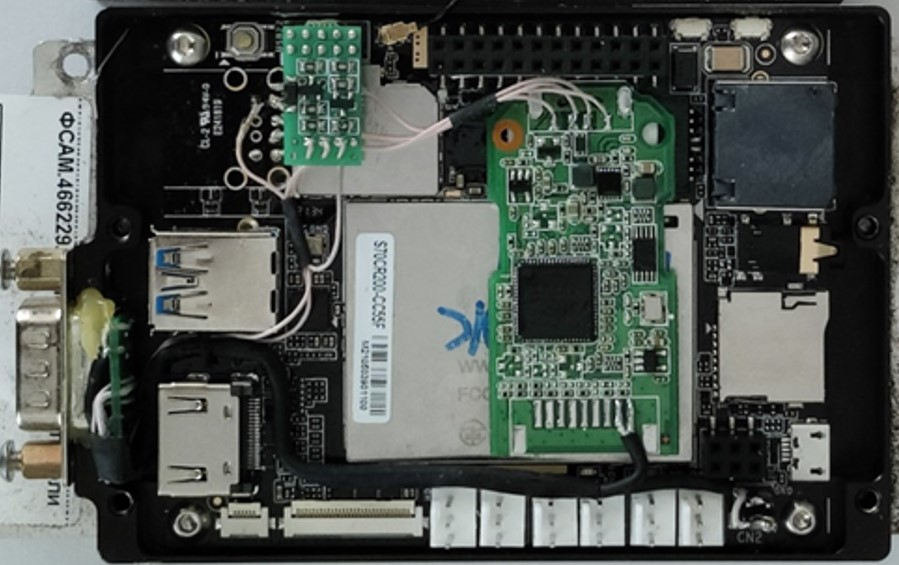
The most interesting part, however, is the main processor they use for target acquisition and tracking: a LattePanda V1 x86 single-board computer (SBC). Running the anemic Intel Atom x5-8350 (the CPU of choice for all those terrible Windows 10 tablets and TV mini PCs some years ago), the choice of a Windows 10 SBC for a military drone is… interesting. It only gets even more interesting when you see that the chosen method of getting the camera’s video signal into the SBC is through an AVerMedia USB capture card, which is made for gaming live-streamers and people who want to record their DVDs. This is made even sketchier because they desoldered one of the USB connectors on the LattePanda, removed the AVerMedia’s plastic case, and directly soldered them together. However, it probably works. Sometimes.
To add stuff to the video output, they used a MAX7456 on-screen-display IC that can add stuff to the screen. I don’t know why they didn’t do this in software, but nothing so far has indicated any sort of quality or elegance in designing, so at least we’re on theme. It’s not immediately clear how the video output is modulated and sent wirelessly since the video signal processing board has an LPC1768 microcontroller with other smaller parts. Given the lack of sophistication so far, it is unlikely that they’re doing something digital with the video output. The video output then goes to a simple RF amplifier board that regulates the power and outputs the signal with a CGH40010F RF GaN JFET. Given the lack of any other RF active components in the RF amplifier board, this board likely uses the JFET in a Class A configuration.
The drone uses a u-blox NEO-M9N (https://www.u-blox.com/en/product/neo-m9n-module) GPS receiver, which is also a favorite of many Arduino projects. Other sensors include a TE Connectivity 4525DO for pressure and altimetry (https://www.te.com/en/product-4525DO-DS5AI001DP.html), a generic SHT21 for temperature and humidity, and a Murata SCC2230 gyroscope and 3-axis accelerometer (https://www.murata.com/-/media/webrenewal/products/sensor/pdf/datasheet/datasheet_scc2230-d08.ashx?la=en&cvid=20190118045358930400).
The drone uses a T-Motor Alpha 80V HV ESC connected to an electric motor for flight – a favorite in many hobbyist drone projects.
It’s interesting to see how simple the whole drone is in its construction. It is on the level of a university project, made from exclusively commercial parts connected with bodge wires and hot glue. Unfortunately, this is enough for the Russian military to wage a horrible war of aggression. We can only hope for more Ukrainian victories and bother our politicians to enable them more.